1. INTRODUÇÃO
A robótica tem se destacado como uma das áreas tecnológicas mais importantes do século XXI, integrando processos industriais, otimizando tarefas repetitivas e contribuindo significativamente para o avanço da automação em diferentes setores. Seu crescimento está diretamente ligado ao desenvolvimento de sistemas inteligentes capazes de interagir com o ambiente, tomar decisões básicas e executar tarefas de maneira precisa e eficiente. Essa evolução tem transformado desde linhas de produção até serviços logísticos, tornando a robótica uma ferramenta indispensável no mundo moderno.
No contexto educacional e científico, a robótica também desempenha papel fundamental ao aproximar estudantes de conceitos relacionados à eletrônica, programação, mecânica e resolução de problemas. A aplicação prática desses conhecimentos estimula o raciocínio lógico, o pensamento crítico e a criatividade, proporcionando experiências reais de aprendizagem. Entre os modelos mais utilizados em estudos introdutórios está o robô seguidor de linha, por apresentar funcionamento simples, mas altamente didático e aplicável a situações de automação.
O robô seguidor de linha é um sistema autônomo que utiliza sensores ópticos para identificar caminhos previamente demarcados no solo, ajustando sua rota conforme as leituras captadas. Esse tipo de robô permite compreender de forma concreta como os sensores interagem com o ambiente, como o microcontrolador interpreta essas informações e como os motores respondem aos comandos de controle. Assim, o funcionamento do robô envolve eletrônica, lógica de programação e mecânica trabalhando de forma integrada.
Este relatório tem como objetivo apresentar o processo completo de desenvolvimento de um robô seguidor de linha, descrevendo seus componentes, a lógica utilizada no controle, as etapas de montagem e os testes realizados. Além disso, discute-se suas aplicações práticas no mundo real e sua importância como ferramenta de aprendizado em automação e robótica educacional.
2. DESENVOLVIMENTO
O desenvolvimento do robô seguidor de linha envolve a apresentação dos conceitos fundamentais do projeto, a descrição dos componentes utilizados, a lógica de controle e as etapas de montagem e testes realizadas. A seguir, são detalhados os principais tópicos.
2.1 Robô e Robô Seguidor de Linha
Os robôs são dispositivos programáveis capazes de realizar tarefas de forma autônoma ou semiautônoma por meio da integração entre sensores, atuadores e sistemas de controle. Segundo Braga (2020), um robô é uma máquina projetada para executar ações automáticas com precisão, utilizando informações recebidas do ambiente e reagindo a elas conforme sua programação. Já Santos (2021) define robô como um sistema mecatrônico que combina eletrônica, mecânica e computação para realizar atividades de maneira eficiente, reproduzindo ou substituindo ações humanas em diversos contextos. Assim, o conceito de robô envolve a capacidade de percepção, processamento de dados e atuação sobre o meio.
Dentro desta categoria, encontra-se o robô seguidor de linha, um dos modelos mais utilizados no ensino de robótica e automação. Ele é um sistema autônomo projetado para se deslocar seguindo um trajeto marcado no solo, geralmente representado por uma linha preta sobre um fundo claro. Seu funcionamento baseia-se na utilização de sensores ópticos que identificam o contraste entre a linha e a superfície, permitindo que o robô ajuste sua movimentação conforme necessário. Através da leitura dos sensores, o microcontrolador interpreta a posição da linha e envia comandos aos motores, corrigindo a trajetória para manter-se sobre o percurso delimitado.
2.2 Componentes Utilizados
Descrição breve dos componentes principais utilizados no robô com imagem ilustrativa — texto primeiro, imagem ao lado em telas grandes e embaixo em telas pequenas.
Arduino Uno (microcontrolador): O Arduino Uno é a unidade central de processamento do sistema, responsável por interpretar sinais, executar comandos e coordenar o funcionamento de todos os componentes conectados. Em termos gerais, ele atua como o “cérebro” do robô, recebendo informações dos sensores e enviando instruções para os atuadores. No robô seguidor de linha desenvolvido, o Arduino processa continuamente os dados captados pelos sensores infravermelhos e determina, em tempo real, como os motores devem reagir para manter o veículo sobre o trajeto.

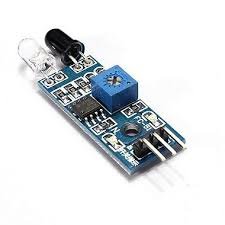
Sensores Infravermelhos (IR): Os sensores infravermelhos funcionam emitindo luz IR e detectando a intensidade refletida pelo solo, permitindo identificar diferenças entre cores claras e escuras. No robô seguidor de linha, os sensores foram posicionados próximos ao chão para distinguir a linha preta do fundo branco. Quando a reflexão é baixa (cor escura), o sensor detecta a linha; quando a reflexão é alta (cor clara), identifica o fundo. Essa informação é enviada ao Arduino, que ajusta a movimentação do robô conforme a posição da linha.
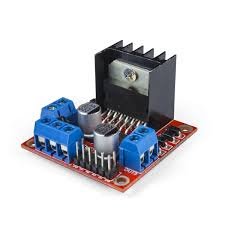
Driver de Motor (L298N): O driver L298N é um módulo projetado para controlar motores DC, permitindo regular velocidade, sentido de rotação e intensidade de corrente. No robô seguidor de linha, ele recebe comandos do Arduino e converte em energia controlada para os motores. Por meio dele, o robô consegue realizar curvas, acelerar e ajustar sua rota de acordo com as leituras dos sensores.
Motores DC: Os motores DC transformam energia elétrica em movimento rotacional. No robô seguidor de linha, dois motores foram acoplados às rodas, permitindo o deslocamento do protótipo. Variando-se a velocidade e o sentido de cada motor, o robô pode seguir em linha reta, fazer curvas e corrigir sua posição.

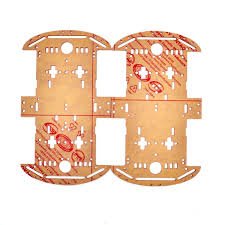
Chassi e Rodas: O chassi sustenta toda a estrutura do robô e acomoda seus componentes eletrônicos. Já as rodas, conectadas aos motores, permitem que o robô se locomova com estabilidade. A montagem adequada do chassi evita vibrações indesejadas e garante melhor leitura dos sensores.
Fonte de Energia (Bateria): A bateria fornece energia para todo o sistema, garantindo autonomia ao robô. Ela alimenta o Arduino, os sensores e o driver de motores, mantendo o funcionamento estável durante a operação.

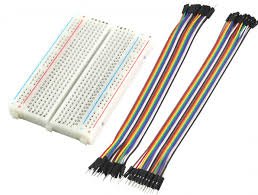
Protoboard, Fios e Conectores: A protoboard permite montar circuitos sem a necessidade de solda, facilitando testes e ajustes rápidos. No robô seguidor de linha, ela foi utilizada para conectar Arduino, sensores e driver de motor de maneira prática e organizada, garantindo que tudo funcionasse corretamente.
2.3 Funcionamento e Lógica de Controle
O funcionamento do robô seguidor de linha baseia-se na leitura contínua realizada pelos sensores infravermelhos posicionados próximos ao solo. Esses sensores detectam a diferença de reflexão entre a faixa preta da pista e o fundo branco. Quando o sensor está sobre a linha escura, o sinal retornado ao microcontrolador é LOW; quando está sobre a área clara, o sinal é HIGH. A partir desses dois valores, o sistema interpreta em tempo real a posição do robô e ajusta sua trajetória.
Quando apenas o sensor esquerdo detecta a linha (LOW), significa que o robô desviou para a direita; portanto, a lógica corrige a direção realizando uma curva para o lado esquerdo. Quando apenas o sensor direito encontra a linha, a correção é feita para a direita. Já quando ambos os sensores detectam simultaneamente a linha, o robô está centralizado no trajeto e segue em linha reta.
Essas decisões são processadas pelo microcontrolador Arduino, que envia comandos ao driver L298N, responsável por controlar o sentido de rotação e a velocidade dos motores. O ajuste de velocidade é feito utilizando sinais PWM, permitindo regular tanto o movimento em linha reta quanto a intensidade das curvas.
Código utilizado no protótipo
// Motor A
const int ENA = 11; // Pino PWM que controla a velocidade do Motor A
const int IN1 = 10; // Pino de direção 1 do Motor A (define sentido)
const int IN2 = 9; // Pino de direção 2 do Motor A (define sentido)
#define s 100 // Velocidade base (speed) usada para andar em linha reta
#define t 130 // Velocidade aumentada para curvas (turning speed)
// Motor B
const int ENB = 6; // Pino PWM que controla a velocidade do Motor B
const int IN3 = 8; // Pino de direção 1 do Motor B
const int IN4 = 7; // Pino de direção 2 do Motor B
// IR Sensors
const int IRSensorLeft = 2; // Sensor infravermelho esquerdo
const int IRSensorRight = 3; // Sensor infravermelho direito
void setup() {
// Configura os pinos ligados aos motores como saída
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Configura os sensores como entrada
pinMode(IRSensorLeft, INPUT);
pinMode(IRSensorRight, INPUT);
// Inicia comunicação serial (útil para testes)
Serial.begin(9600);
}
void loop() {
// Leitura dos sensores (LOW = preto, HIGH = branco)
bool leftSensor = digitalRead(IRSensorLeft);
bool rightSensor = digitalRead(IRSensorRight);
// Mostra as leituras no monitor serial
Serial.print("Left Sensor: ");
Serial.print(leftSensor);
Serial.print(" | Right Sensor: ");
Serial.println(rightSensor);
// Ambos sensores encontram a linha → seguir em frente
if (leftSensor == LOW && rightSensor == LOW) {
moveForward();
}
// Sensor esquerdo encontra linha → virar direita
else if (leftSensor == LOW && rightSensor == HIGH) {
turnRight();
}
// Sensor direito encontra linha → virar esquerda
else if (leftSensor == HIGH && rightSensor == LOW) {
turnLeft();
}
// Nenhum sensor encontra a linha → parar (linha perdida)
else {
stopMotors();
}
delay(100); // Delay pequeno para estabilizar as leituras
}
void moveForward() {
// Motor A para frente
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, s); // Velocidade base
// Motor B para frente
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, s); // Velocidade base
}
void turnRight() {
// Motor A para trás (ajuda virar mais rápido)
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, t); // Velocidade maior
// Motor B para frente
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, t); // Velocidade maior
}
void turnLeft() {
// Motor A para frente
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, t); // Velocidade maior
// Motor B para trás
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, t);
}
void stopMotors() {
// Para motor A
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(ENA, 0);
// Para motor B
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENB, 0);
}
2.4 Etapas de Montagem e Testes
A construção do robô seguidor de linha foi realizada de forma sequencial e estruturada, envolvendo etapas de montagem mecânica, integração eletrônica, programação e validação prática. As fases descritas a seguir garantiram o funcionamento correto do protótipo e permitiram ajustes essenciais para a operação eficiente do sistema.
Montagem eletrônica
Nesta etapa inicial foi feita toda a interligação dos componentes eletrônicos. Realizou-se a conexão dos sensores infravermelhos ao Arduino, o cabeamento do driver L298N aos motores DC e a configuração da alimentação do sistema. Cada ligação foi verificada individualmente para garantir a polaridade correta, o fluxo adequado de corrente e a integridade das conexões, evitando curtos-circuitos ou falhas durante os testes.
Desenvolvimento do código
Com a parte eletrônica concluída, iniciou-se a etapa de programação utilizando a IDE do Arduino. Nessa fase foram definidas as entradas correspondentes aos sensores, as saídas de controle do driver L298N e a lógica responsável pelo movimento do robô. Diversos ajustes de velocidade, tempo de resposta e comportamento em curvas foram realizados até que o robô apresentasse estabilidade e precisão adequadas.
Fixação dos componentes no chassi
Após validar o circuito e o código, todos os componentes foram fixados no chassi do robô. Os sensores infravermelhos foram posicionados a poucos milímetros do solo para melhorar a leitura do contraste da linha. O driver, o Arduino e a bateria foram organizados de forma segura e equilibrada, garantindo que o peso fosse distribuído e os cabos devidamente presos.
Testes de movimentação
Com o robô totalmente montado, foram realizados testes em pistas contendo curvas fechadas, retas longas e ângulos variados. Estes ensaios permitiram ajustar a sensibilidade dos sensores, calibrar a velocidade dos motores (valores s e t do código), corrigir a altura e alinhamento dos sensores e melhorar a capacidade de curva. Durante os testes, observou-se o comportamento do robô em cenários reais, possibilitando identificar pontos de melhoria.
2.5 Aplicações Práticas
Veículos Guiados Automaticamente (AGVs)
Os Veículos Guiados Automaticamente (AGVs) representam uma das aplicações reais mais próximas do funcionamento de um robô seguidor de linha. Utilizados em fábricas, indústrias e centros de distribuição, esses veículos se deslocam seguindo rotas previamente definidas no chão, muitas vezes utilizando sensores ópticos semelhantes aos utilizados no protótipo desenvolvido.
Linhas de montagem automatizadas
Nas linhas de montagem automatizadas, é comum o uso de plataformas móveis ou esteiras inteligentes que transportam peças ao longo das etapas de produção. Esses sistemas funcionam com base em rotas definidas no ambiente, seguindo linhas, faixas magnéticas ou sensores de posicionamento, com princípios semelhantes ao do seguidor de linha.
Sistemas de logística interna
Empresas de médio e grande porte frequentemente utilizam robôs móveis para a organização e movimentação de produtos dentro de armazéns, supermercados e centros de distribuição. Esses robôs empregam tecnologias como sensores infravermelhos, leitura de faixas no piso ou códigos de localização para definir suas rotas.
Prototipagem tecnológica
O robô seguidor de linha também desempenha papel fundamental na etapa de prototipagem tecnológica, sendo amplamente utilizado em escolas, cursos técnicos, universidades e competições de robótica. Ele serve como base para o desenvolvimento de sistemas mais sofisticados, como veículos autônomos e robôs inteligentes.
3. CONCLUSÃO
A construção do robô seguidor de linha permitiu compreender, de forma prática, como a integração entre sensores, motores, driver de controle e programação pode resultar em um sistema autônomo capaz de interpretar o ambiente e agir sobre ele. Ao longo do desenvolvimento, ficou evidente que, mesmo em projetos relativamente simples, cada componente exerce um papel fundamental para o funcionamento correto do conjunto.
Os testes realizados em diferentes tipos de pista mostraram que o robô foi capaz de seguir o trajeto com precisão, desde que os sensores estivessem corretamente alinhados e calibrados. Ajustes de velocidade, posicionamento e lógica de correção foram essenciais para garantir uma movimentação estável, o que reforça a importância do processo de experimentação e melhoria contínua durante a fase de testes.
De modo geral, o projeto demonstrou que sistemas autônomos podem ser desenvolvidos a partir de tecnologias acessíveis e conceitos fundamentais da robótica. A experiência proporcionou uma compreensão mais ampla sobre automação e controle, servindo como base sólida para o desenvolvimento de projetos mais complexos na área da tecnologia.
REFERÊNCIAS
ARDUINO. Arduino Documentation. Disponível em: https://www.arduino.cc/. Acesso em: 24 nov. 2025.
AUTODESK. Tinkercad Circuits – Simulador de Circuitos Online. Disponível em: https://www.tinkercad.com/circuits. Acesso em: 24 nov. 2025.
ELETROGATE. Robô Seguidor de Linha – Tutorial Completo. Blog Eletrogate, 2020. Disponível em: https://blog.eletrogate.com/robo-seguidor-de-linha-tutorial-completo/. Acesso em: 24 nov. 2025.
EMBARCADOS. Portal de conteúdo sobre eletrônica, programação e sistemas embarcados. Disponível em: https://embarcados.com.br/. Acesso em: 24 nov. 2025.
ROBOCORE. Tutoriais, cursos e projetos de robótica. Disponível em: https://www.robocore.net/. Acesso em: 24 nov. 2025.